Autonomous Surgical Suturing
Automating Multi-Throw Multilateral Surgial Suturing with a Mechanical Needle Guide and Sequential Convex Optimization
Robotic Surgical Assistants (RSA)

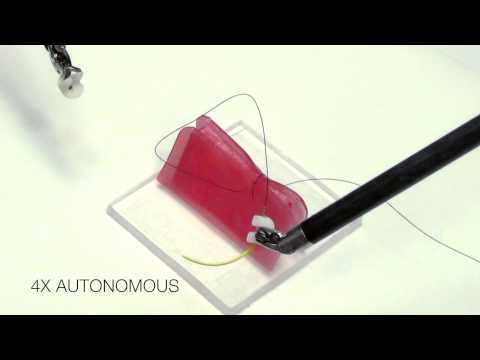
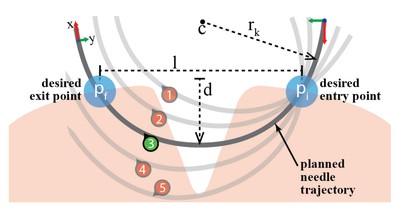
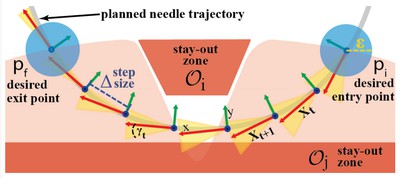
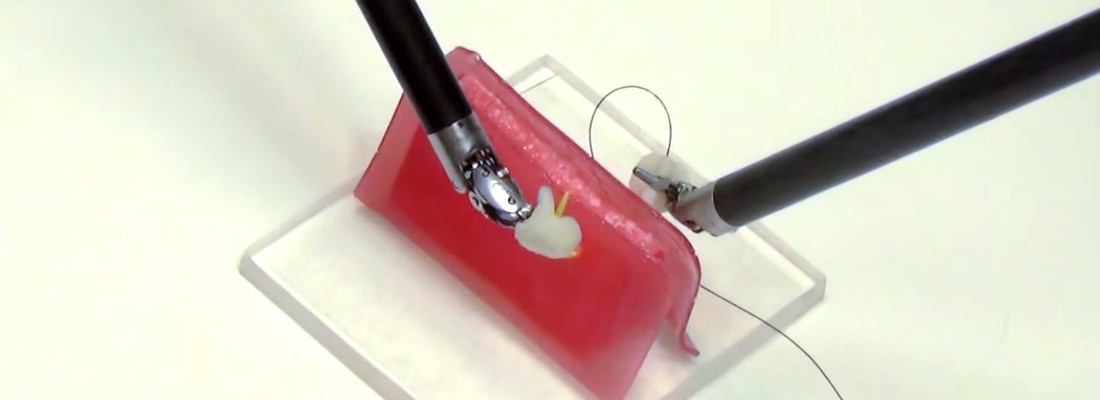
Autonomous Multi-Throw Multilateral Surgical Suturing